无人机在进行测绘作业时,非常容易受到一些外界因素的干扰,进而使得成果精度存在误差。影响精度的因素很多,前面我们为大家介绍了相机对于成果精度的影响,本期,我们再来聊聊环境因素。
本期内容是睿铂结合客户反馈与实际作业经验,对影响无人机测绘精度的因素进行了分析,并同时提出了一些建议以供各位朋友参考。
一、天气状况
天气的主要影响因素是光线和风。无人机航测作业前,要掌握当前天气状况,并观察云层厚度、光照强度和空气能见度。最理想的作业环境是在9点-15点之间,光照适中,无雾霾,大气能见度高,且环境光呈漫反射状态时。
其他时间光照强度较弱且太阳高度角偏大,部分测区还可能碰到雾霾。这些情况可能导致采集到的建筑物背阳面空三匹配精度差,纹理模糊且亮度很低,最终影响建模效果,严重影响视觉观感。

向阳面

背阴面细节
其次是风速的影响。风速过大会对无人机飞行速度和飞行姿态造成较大干扰,导致空中成像扭曲程度相对较大,最终成像模糊。另外,过大的风速也会对无人机的动能造成非常大的损耗,导致飞行时间急剧减少,最终造成项目的工期延误。
最理想的飞行环境是无风或者静风状态,风速超过10m/s时不建议飞行。无人机倾斜摄影作业时,飞行速度尽量控制在7-9m/s,速度适中即可。
二、航线规划
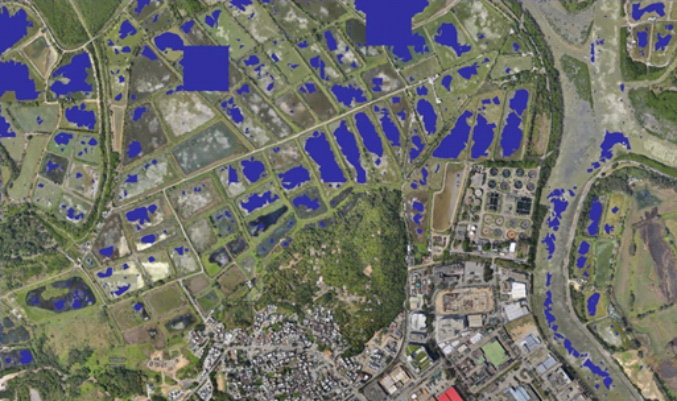
在地形高差较大的区域,航测的数据误差变化也较大,模型的精度难以保证统一,达不到精度要求。
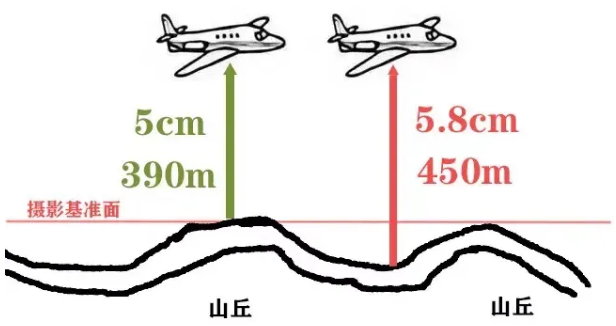
睿铂为各位朋友梳理了不同落差区域无人机航线规划的要点,给出了分层飞行的具体设置步骤;另外在仿地飞行关键环节及作业注意事项介绍中,具体介绍了仿地飞行设置的三大关键步骤,以期帮助各位外业朋友解决最具代表性的高差引起的分辨率超限问题。
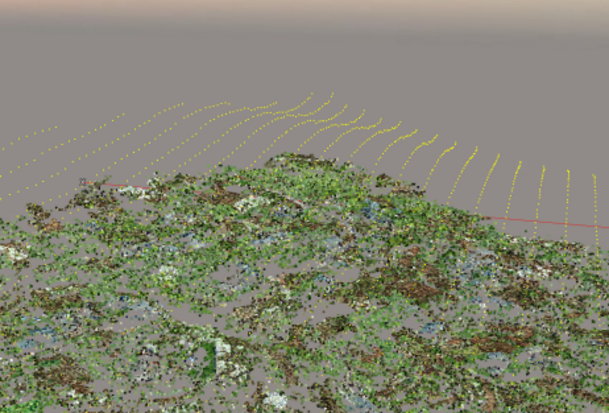
仿地飞行变高航线
另外航线方向尽量的朝着建构筑物复杂的面进行航飞(获取更多细节),如有可能尽量顺着房屋间隔的缝隙进行飞行,以获得更好的缝隙纹理。
三、像控点布设
空中三角测量是基于地面像控点坐标,利用后方交会原理计算得到相片的内方位元素和外方位元素。再基于立体像对中的内外方位元素和像点坐标,利用前方交会原理计算得到对应的地面坐标。
因此,平坦地区应均匀分布像控点,高差大的测区要加密像控点,这样区域网平差后的坐标值更趋近于实际值,从而提高像点对应的地面坐标精度。
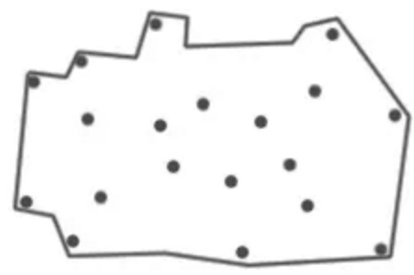
不规则测区像控点布设方案

带状测区像控点布设方案
像控点布设是最基本的保证精度的方法,睿铂曾为大家介绍过不同形状测区的像控点布设方案和注意事项,希望能助外业数据采集一臂之力。
四、重叠率设置
重叠率是提高相片连接点的重要保障,重叠率过低会使每个地物点仅在少量航片中显现,导致照片连接粗糙,甚至出现空洞、拉花现象;重叠率过高则会极大的增加内业的数据处理量,导致项目进度缓慢。
航线重叠度经验值通常保持在航向80%,旁向70%;房屋密集区等可增加至83%,75%;高楼区至少保证楼顶航向60%,旁向50%的重叠度以至于不会出现空洞(单面女儿墙除外)。
2021年,随着实景三维中国项目的开展,智慧城市项目也必然迎来井喷。然而由于短焦距相机的焦段限制,注定了其在百米级智慧城市项目中的应对乏力,盲目提高重叠率或者盲目拉长焦距都会影响建模的效果和效率。
经过长时间的实验与研发,睿铂DG4Pros相机在模型效果、模型精度与建模效率之间取得平衡,并且在相机研发过程中就融合了多次实地测试,经过反复的修正,DG4Pros已经成为睿铂当之无愧的旗舰机产品,是应对百米级智慧城市项目的利器。
五、曝光质量
倾斜相机作为精密光学电子仪器,光学部件直接关系到原始航片采集质量的高低,而原始航片的质量也直接关系到项目能达成的最好效果。
DG4Pros为了控制镜头体积采用了非球面镜片,并且把光学镜头整体畸变控制到了万分之四以内。每组镜头采用一片超低色散ED镜片,以修正、消除彗差型像差及色差现象。
即使无人机飞行姿态轻微扰动,相机也能够尽可能保证五个镜头影像分辨率基本一致,提高空三通过率与模型精度。

六、曝光时间
曝光时间的选取和天气有着密切的关系,比如太阳光较强时迎光面产生航片过曝、背光面欠曝的问题;阴天因为光照不足,导致采集的地物纹理不清晰。对于智慧城市项目而言,城市中玻璃幕墙较多,反射的光线更为杂乱,模型精度较差。

DG4Pros开放参数调节功能,客户可根据测区光线的具体情况使用睿铂自主开发的小程序“相机调试程序”进行参数调节。
此功能对于光线变化较大、太暗或者高亮的建筑场景实现正确曝光有显著帮助。相机可根据光线的强度调整影像对比度,提高图像宽容度,减小建筑体迎光面过曝和背光面欠曝的现象。
无人机航测带来了外业工作种种便利的同时,对外业测量也是有一定要求的。因此,在外业作业时一定要严格注意天气状况、航线规划、像控点布设、重叠率等因素对航测精度的影响。
同时也要注意针对不同的项目特点,选择合适的相机进行作业,可使用辅助软件处理航片,减少空三过程中的累计误差,减少空三失败概率等。