一、项目背景
本项目任务目标是为永靖至广河高速公路建设提供基础测绘保障服务。根据项目建设需求,我公司完成三、四等平面控制网的布设与测量;基于倾斜摄影测量技术,完成无人机航摄、像控点布设与测量、实景三维模型制作、1:2000地形图采集与编辑,为公路选线设计及施工放样等提供及时、准确的数据产品。
二、单位简介
甘肃道远测绘工程有限公司具有乙级测绘资质,技术力量雄厚,仪器设备先进、齐全,承担完成多项高山区、西部戈壁无人区的高速公路工程测量任务,以及城市大规模实景三维建模数据生产及大比例尺地形图测绘项目。
三、测区介绍
测区主要位于临夏州永靖县、东乡县、广河县、定西市临洮县境内。测区地形主要为山地、高山地,山体海拔高低悬殊,地形复杂,山川交错。测区属于洮河流域,作业范围分布于洮河两岸。测区地处青藏高原东北边缘,气候处于温带半湿润区与高寒阴湿区过渡带,具有大陆性、季风性的山地气候特点。
经高速公路G75、国道G213可到达测区,测区内有乡道169通过,山区以山地公路为主,交通较为不便,且部分山区无通讯信号,控制点埋设和测量比较困难。

四、设备选用
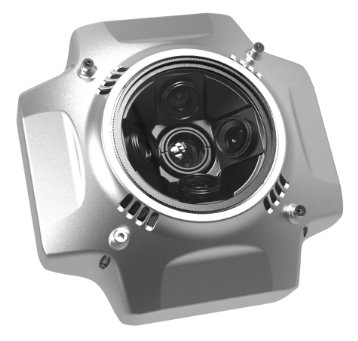
采用垂直起降固定翼无人机作为飞行平台,采用睿眼DG4PRO五镜头倾斜摄影相机作为任务设备。
航摄相机包括1个正视相机和4个环视相机,构建最佳合理的环视相机之间及环视相机与正视相机之间的位置角度关系,是实现较好效果的关键。5个相机中,正视相机采用垂直90度安置,其余前视、后视、左视和右视相机采用45度倾斜方式安置。

此种角度安置组合一方面考虑无人机飞行高度较低,只有较大的倾斜角度才能更好地获取地物侧面纹理,另一方面通过镜头视角和倾斜角度联合计算,此种安置组合时,侧倾相机和正射相机获取的影像保证了15°夹角的重叠,有利于提高三维重建时的精度和效率。
五、航飞概况
5.1▪技术参数设定
根据任务需求及有关技术规范的规定,在航飞控制器上设定如下所示。
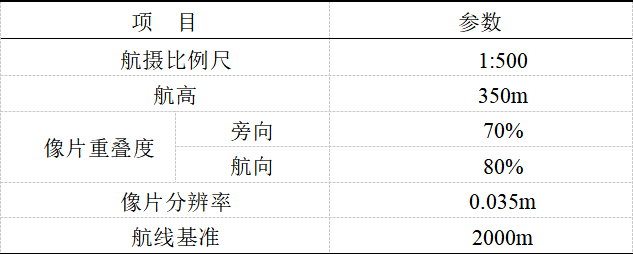
本项目由于在高山区执行航摄任务,为了保障模型质量,提高测图数学精度,加大了航摄比例尺,按1:500航摄比例尺执行任务。
5.2▪数据处理及传输
采用JoPPS用于实现数据获取及处理,具体为获取POS数据、移动站和基站GPS差分数据、基站位置数据,并对以上数据进行后处理,得到精确的姿态文件。Recorder用于传输GPS数据。
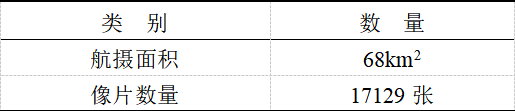
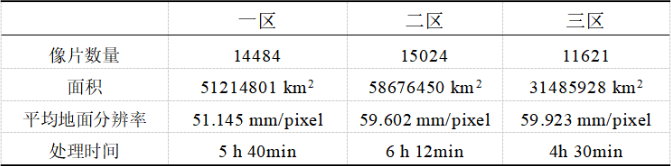
5.3▪成果数量
每个架次飞行航摄面积约为3~4km2,航线长度约为60km,本项目共完成飞行20个架次,完成的航摄成果数量如下。
5.4▪质量情况
本次获取的成果影像单张彩色像片均影像清晰,能够正确地辨认出各种地物,相邻的影像间相同地物色调基本一致,整个摄区的像片色调效果也基本均匀一致,达到本项目所需的影像质量要求。
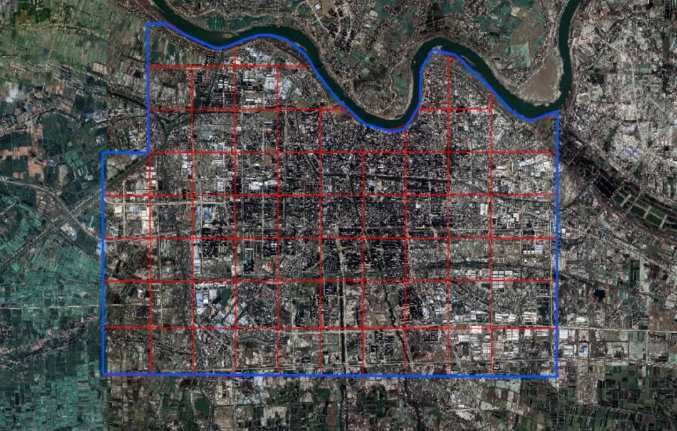
5.5▪像控点布设与测量
本项目按航摄比例1:500比例尺的要求,像控点间距为4-5条航线间隔,共布设400个像控点。

六、数据处理结果
6.1▪工作集群建立
集群是一组相互独立的、通过高速网络互联的计算机,它们构成了一个组,并以单一系统的模式加以管理,即不止一台电脑在战斗的工作方式。
工作集群的建立步骤:
1)将所有集群电脑连接组建成一个局域网;
2)共享主机计算机中存放工程数据和位置的盘,并修改盘符;
3) 在其他电脑中建立相应的主机盘符的映射,并修改工作引擎的工作目录。然后便可在主机盘中新建Context Capture工程,创建Block,进行具体作业。
6.2▪空三加密
(1)新建工程
进入Context Capture系统,新建一个工程项目,创建空的Block。Block是一个项目当中的一个块,用来管理组织照片,以及空三转换(会形成新的block),新建production(项目成果,模型、影像、地形),一个project可以有多个block。
(2)导入数据
在新建的工程项目中导入数据。首先新建Block,然后导入影像。在导入的影像中,输入航摄相机的传感器尺寸、镜头焦距数据。
(3)控制点影像关联
在空三加密运算前,对像控点与影像进行人工关联,即在“Control Points”下进行刺点。有效的控制点集合均包含三个或以上控制点,且每一个控制点均具有两张及以上影像刺点。
(4)提交空三加密任务
在导入数据并设置参数后,提交空三加密任务。
在基于Context Capture系统进行空三加密运算时,可分为多个区块进行运算。本项目共分为6个区块进行空三加密计算。仅以3个区块为例:
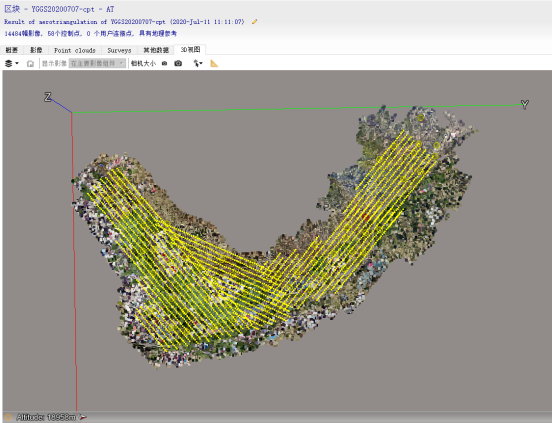
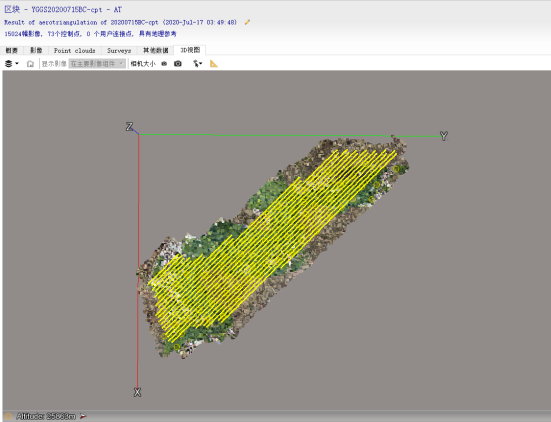
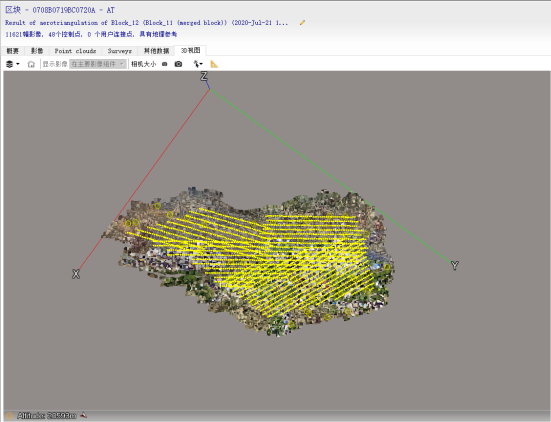
(5)空三加密成果分析
用颜色显示连接点的不确定情况,单位是米,蓝色是不确定度最好的点,绿色是较好的点,平均值为0.0967m。
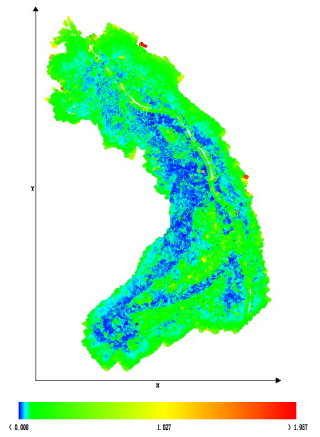
从统计表中可知,空三加密精度远优于技术规范的规定。
6.3▪三维重建
空三加密任务完成后,可进行三维重建任务。Context Capture分析来自不同视点的静态主体的几张照片,并自动检测对应于同一物理点的像素。从许多这样的对应关系中,可以推断出照片的相对方向和场景的准确3D形状。借助Context Capture,可利用数码相机所拍摄的照片,为当前环境轻松生成高分辨率的三维模型。可以按照自己的需求,以任意尺寸(大到城市规模)或分辨率创建模型。
实景三维模型的生产及质量必须符合《城市三维建模技术规范》的要求。模型质量要求主要是:
1)模型的完整性。不能存在破洞等。
2)模型制作的准确性,主要是模型的数学精度的准确性。
3)模型纹理的准确性、完整性。
6.4▪DLG数据采集与编辑
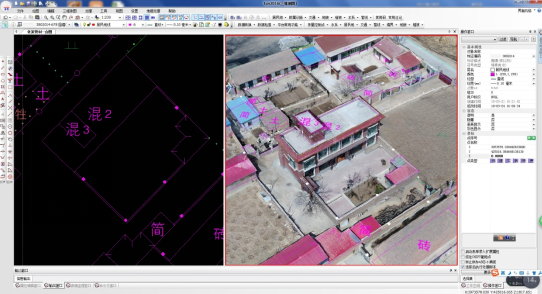
采用EPS摄影测量工作站系统,完成1:2000大比例尺地形图数据采集与编辑。通过二三维交互采集采编一体化,直接对地物进行采集测图,相对传统的立体像对测图,无需进行房檐改正,大大提高了效率。
七、项目结论
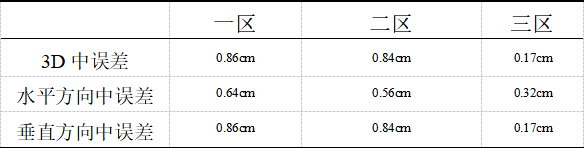
采用天宝R4 GPS接收机作为精度检测的仪器设备,对三维模型的平面精度和高程精度进行实地检测。在任务区域内随机选取一定数量的、分布均匀的检测点进行精度检测,精度统计见下表。

由此可见,本项目区域实景三维模型平面精度和高程精度远优于CH/T 9015-2012《三维地理信息模型数据产品规范》的相关规定,完全满足1:2000大比例尺测图的需求。
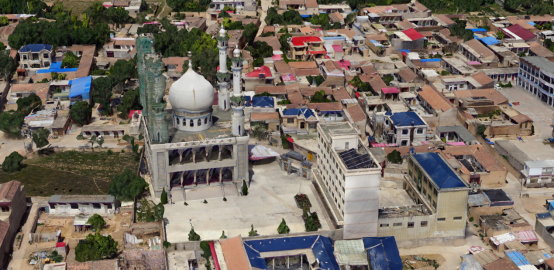
八、模型截图

九、成果应用介绍
基于得到的实景三维模型,已完成1:2000大比例尺地形图测绘、DTM成果数据制作等,用于公路线路规划设计等任务。
基于SuperMap iDesktop 10i三维模块,建立三维模型,并浏览三维场景,可以设置三维场景的不同属性,进行模拟飞行浏览以及淹没演示等。
三维模型可视化能够提供一些二维数据无法直接提供的信息,在三维GIS中,三维数据可规化真实表现空间数据、逼真模拟地理信息现场,进而直观地展现用户感兴趣大的数据。
十、项目总结
基于无人机倾斜摄影测量系统的实景三维建模方法,具有多种优势。传统的摄影测量大都采用大飞机进行航摄,需要机场起降、需要申请空域,生产周期长,效率低,成本高。基于无人机倾斜摄影测量系统进行航空摄影,能够快速、高效地获取多角度原始影像,为三维建模提供了丰富的数据基础。
采用EPS软件平台三维测图模块通过双屏模式同时加载实景三维模型数据和正射影像数据,二三维联动一体化进行地形图测绘。该作业模式的优势体现在以下四个方面:
(1)数据生产重心由外业转为内业,生产作业劳动强度降低;
(2)以实景三维模型数据和正射影像为源数据,多视角作业,作业效率提升;
(3)生产过程干扰性因素少,且采集过程不受现场不配合影响;
(4)数据检核具有可重复性,数据精度保障性强;
(5)EPS地理信息工作站一套数据输出多套成果。