睿铂在售后阶段,为用户解决了许多问题。在Smart3D软件方面,我们总结了用户遇见次数最高的一些问题,并在这里做出统一回复,供大家参考。
刺点完成后更改坐标系
刺点完成后发现坐标系选择错误,而直接更改坐标系的话,Smart3D却不能保存当前设置。
此时只需要将坐标系改为正确的坐标系后,点击右侧“将所有点的SRS设置为选定SRS”按钮,然后保存即可,不用再刺一遍控制点。

非固定值中央经线的设置
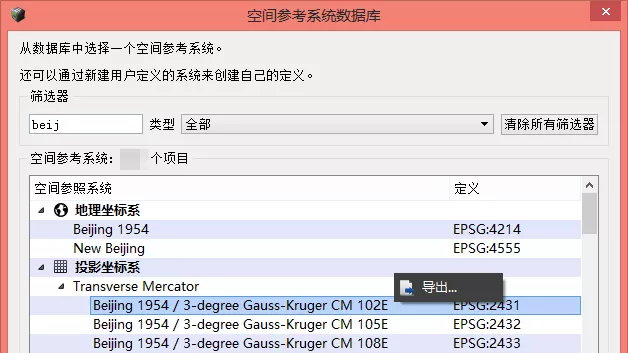
如果坐标系为Beijing 1954,中央经线为102.2度,空三时如何在Smart3D中设置坐标系?
(1)在坐标系选择界面找到与之临近的坐标系,然后导出,如下图。
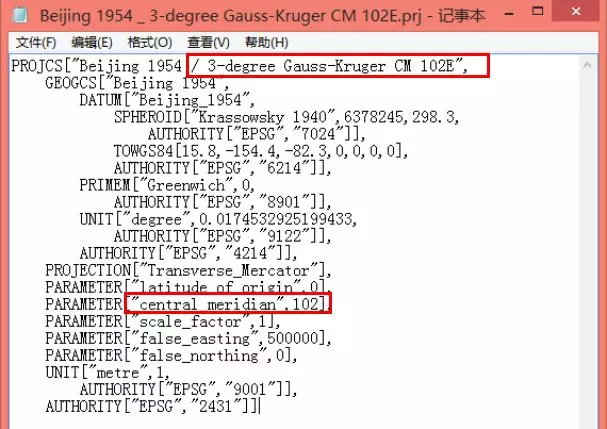
(2)在记事本中打开导出的.prj文件,将下图中的两处102修改为102.2,然后保存。
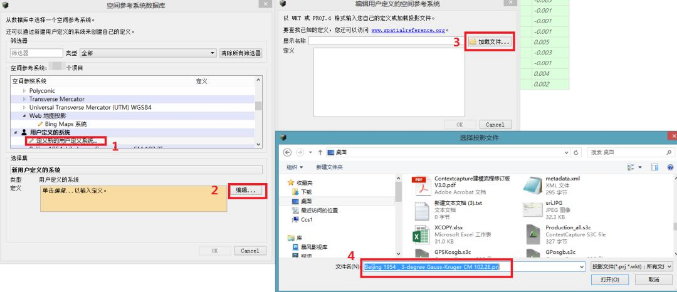
(3)在定义新的用户坐标系统中加载保存后的.prj文件即可。
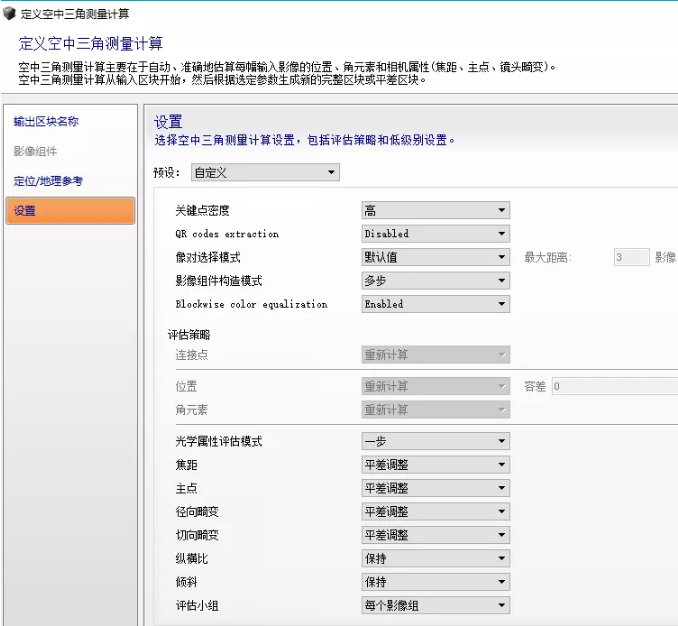
空三的设置一般怎么选择?
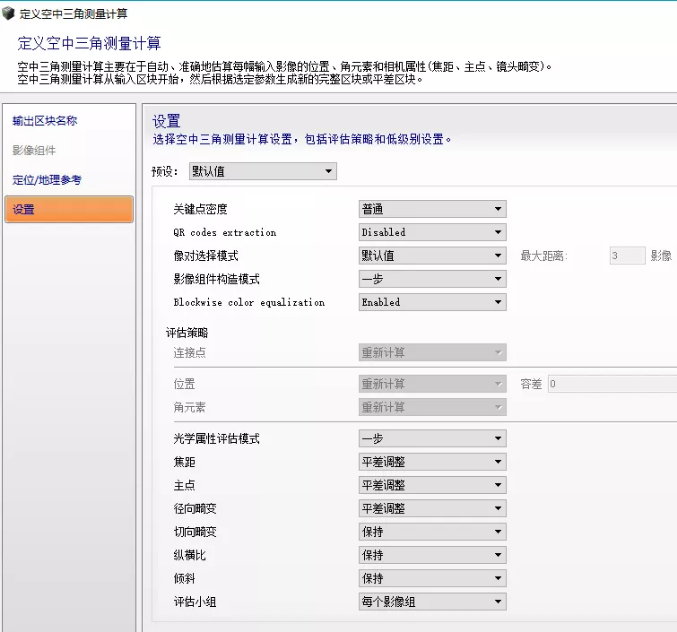
(1)关键点密度:一般为普通,仅对影像或纹理不足选择高。
(2)影像组建构造模式:一般选择一步,若一步无法将大比例的影像包含在主要影像组件,则用多步。
(3)角元素与位置一般保持默认。
(4)光学评估模式:一般选择一步,若空三因初始参数和实际值差别太大而失败,则选择多步。
(5)关于相机,一般保持默认。
空三一般设置
空三高密度匹配设置
CC中提交多个成果任务时,如何插队?
cc的优先级是空三大于建模。在生产中的优先级一般可以如下设置:
(1)在production生产项目运行界面,点击监视任务序列打开任务序列监视器,单击打开任务序列目录:
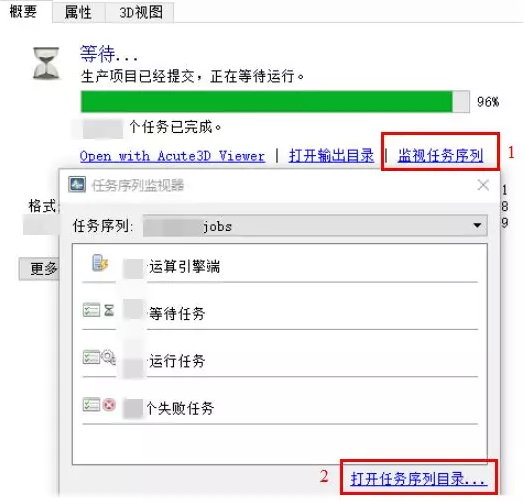
(2)打开pending文件夹,此时可以看到三个文件夹分别是high、low、normal。进入normal文件夹选择需要插队的任务并剪切,返回上一文件夹,选择high,将剪切的任务粘贴进去即可。

.osgb格式数据用3D Viewer预览操作
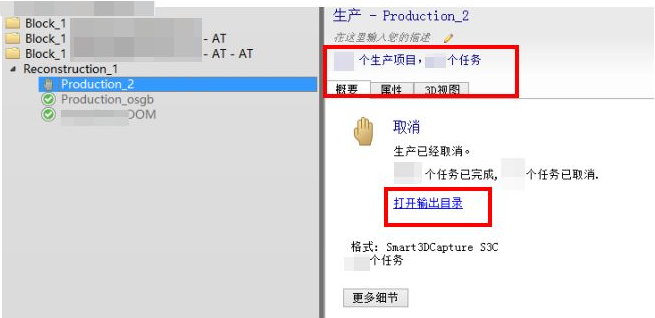
若生成三维模型的格式若为.osgb,该数据成果无法在“3D视图”和3D Viewer浏览器中直接查看模型效果,若想要直接查看,则需要使用.s3c索引文件重新配置。
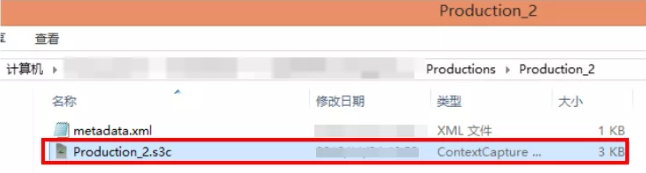
(1)提交生产S3C项目后立即停止,工程目录下会出现Production.s3c索引文件,点击“打开输出目录”。
(2)将.s3c文件复制到.osgb格式目录下
(3)将.s3c文件拖入CC S3C Cpmposer软件中打开
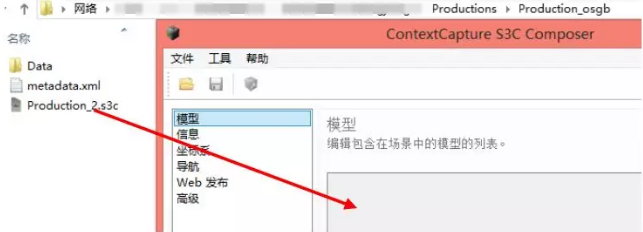
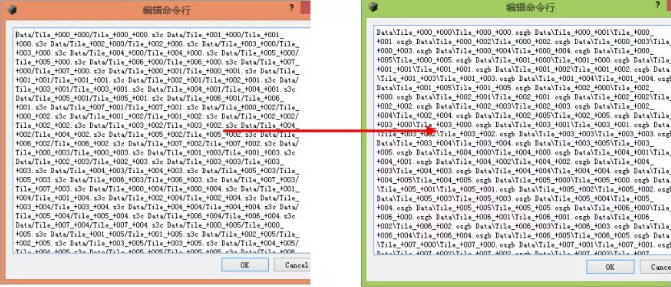
(4)选择上方“工具”中的“编辑命令行”。

(5)复制所有文字,在记事本中粘贴后,利用记事本中的替换功能,将文本中所有的.s3c后缀替换为.osgb后缀,再复制粘贴回左图的窗口中,点击“OK”,如下图所示:
(6)点击上方“保存”按钮,替换原有.s3c索引文件,即可直接打开该文件以查看模型效果。